DG Poisson#
This tutorial follows python/demo/demo_dg_poisson.py. It extends the scalar
cut Poisson demo to a discontinuous Galerkin space, so the physical cells, the
embedded boundary, and the interior skeleton all become part of the cut
integration problem.
The cut DG formulation is closest to the stabilized cut discontinuous
Galerkin framework cited in the related literature below.
Model Problem#
The physical domain is the negative phase of a circular level set function,
The demo solves
with the manufactured field
Implementation Order#
The demo runs in this order:
Define the circular level set.
Build the triangular background mesh and interpolate the P1 level set.
Classify inside/active/cut cells, create cell and interface runtime rules, then cut the active interior skeleton.
Build
dx_omega,dS_omega,dx_gamma, anddS_ghost.Build the DG space, SIPG volume/skeleton terms, Nitsche boundary terms, and ghost penalty.
Assemble, deactivate inactive dofs from the CutFEMx form active domain, and solve the serial sparse system.
Interpolate exact/error fields, assemble the cut-domain \(L^2\) error, print diagnostics, and write background plus cut-domain output.
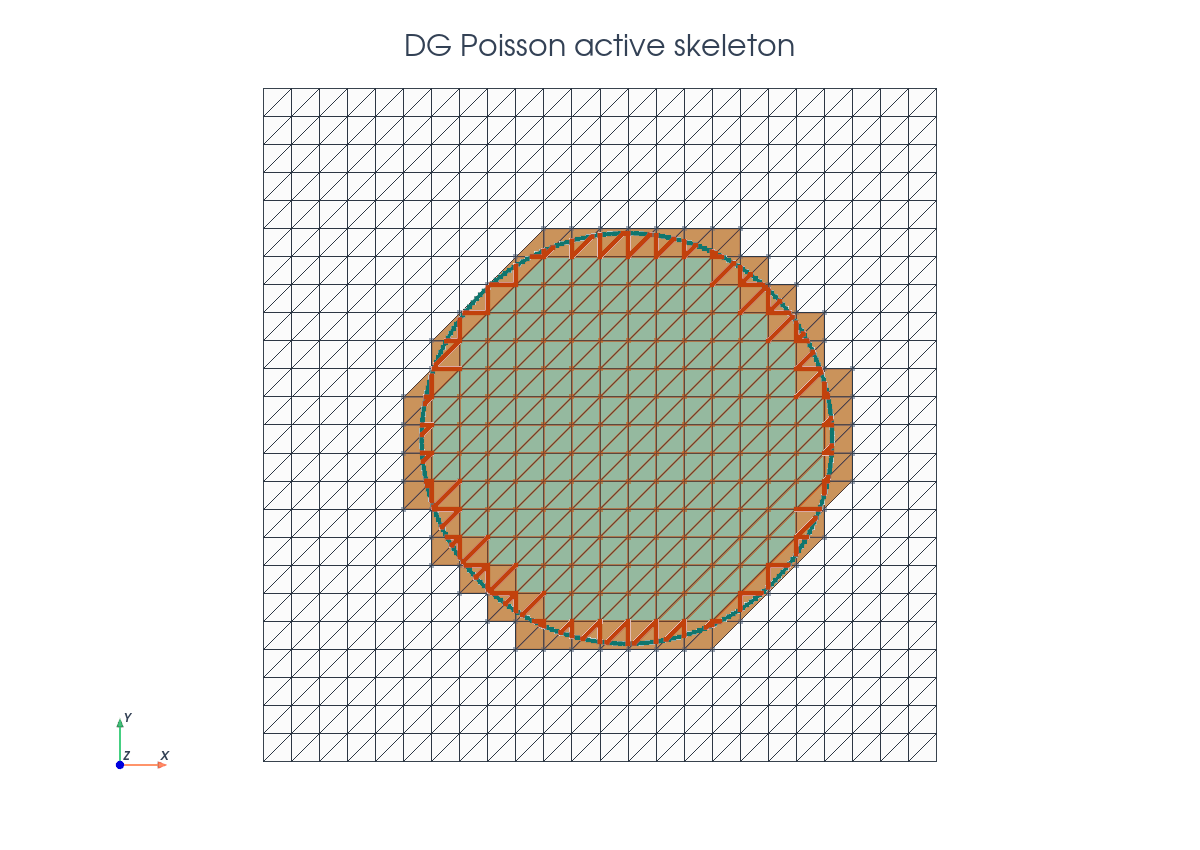
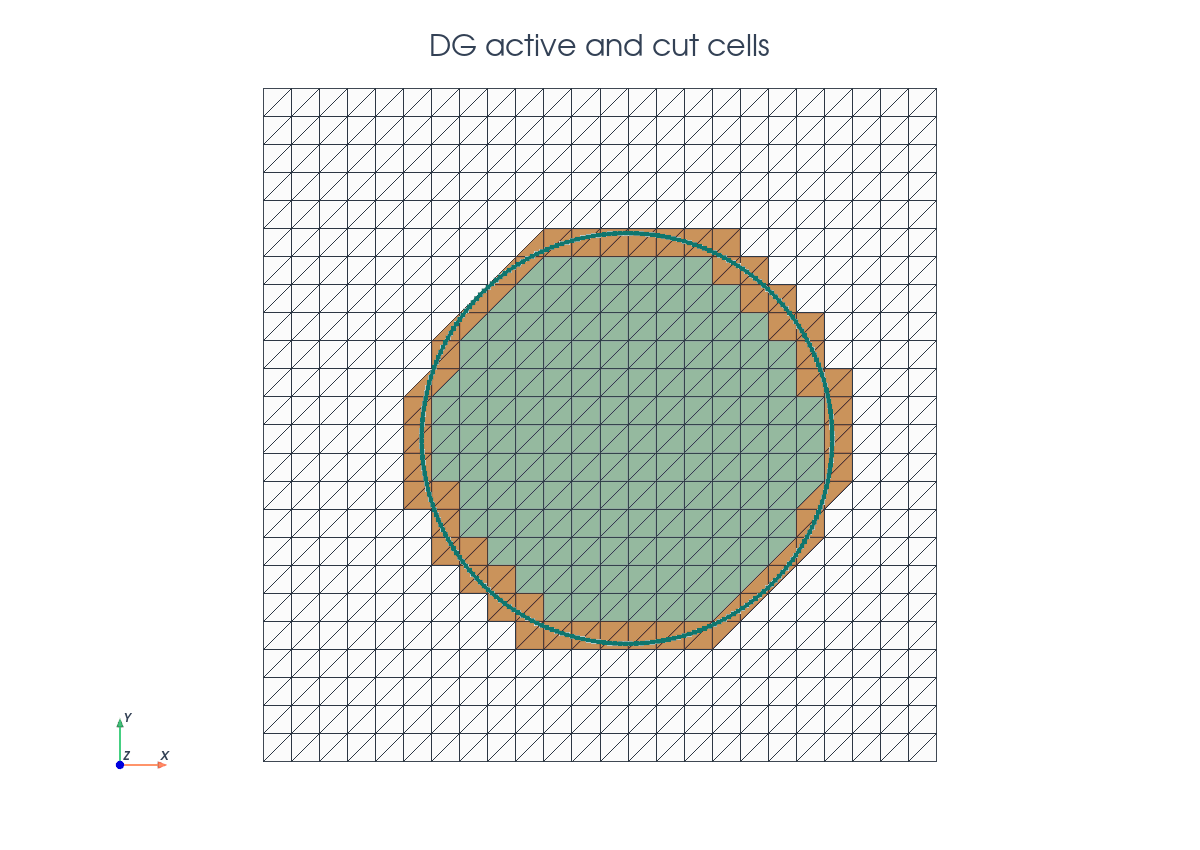
Geometry And Active Cells#
The background mesh is cut once with the level set function, and predicates select the cells required by the DG formulation. Interior cells use ordinary cell integration and cut cells receive
runtime quadrature rules. We also determine the active mesh formed by all interior and intersected cells. The active cell domain is used to obtain all facets that are interior to the active mesh to obtain skeleton_facets. We then compute the cut between the level set function and those facets.
cell_cut = cutfemx.cut(phi)
inside_cells = cutfemx.locate_entities(cell_cut, "phi<0")
active_cells = cutfemx.locate_entities(cell_cut, "phi<=0")
cut_cells = cutfemx.locate_entities(cell_cut, "phi=0")
skeleton_facets = cutfemx.interior_facets_for_cells(msh, active_cells)
skeleton_cut = cutfemx.cut(phi, skeleton_facets, facet_dim)
omega_interior_facets = cutfemx.locate_entities(skeleton_cut, "phi<0")
cut_skeleton_facets = cutfemx.locate_entities(skeleton_cut, "phi=0")
Runtime Quadrature#
The DG form uses three kinds of cut quadrature: volume rules on \(K\cap\Omega\), interface rules on \(K\cap\Gamma\), and skeleton rules on \(F\cap\Omega\) for active interior facets.
cell_rules = cutfemx.runtime_quadrature(cell_cut, "phi<0", order)
interface_rules = cutfemx.runtime_quadrature(cell_cut, "phi=0", order)
omega_cut_facet_rules = cutfemx.runtime_quadrature(skeleton_cut, "phi<0", order)
These rule sets define the measures used by the UFL form:
dx_omega = ufl.Measure(
"dx", domain=msh, subdomain_id=0, subdomain_data=[inside_cells, cell_rules]
)
dx_gamma = ufl.Measure("dx", domain=msh, subdomain_id=1, subdomain_data=interface_rules)
dS_omega = ufl.Measure(
"dS",
domain=msh,
subdomain_id=0,
subdomain_data=[omega_interior_facets, omega_cut_facet_rules],
)
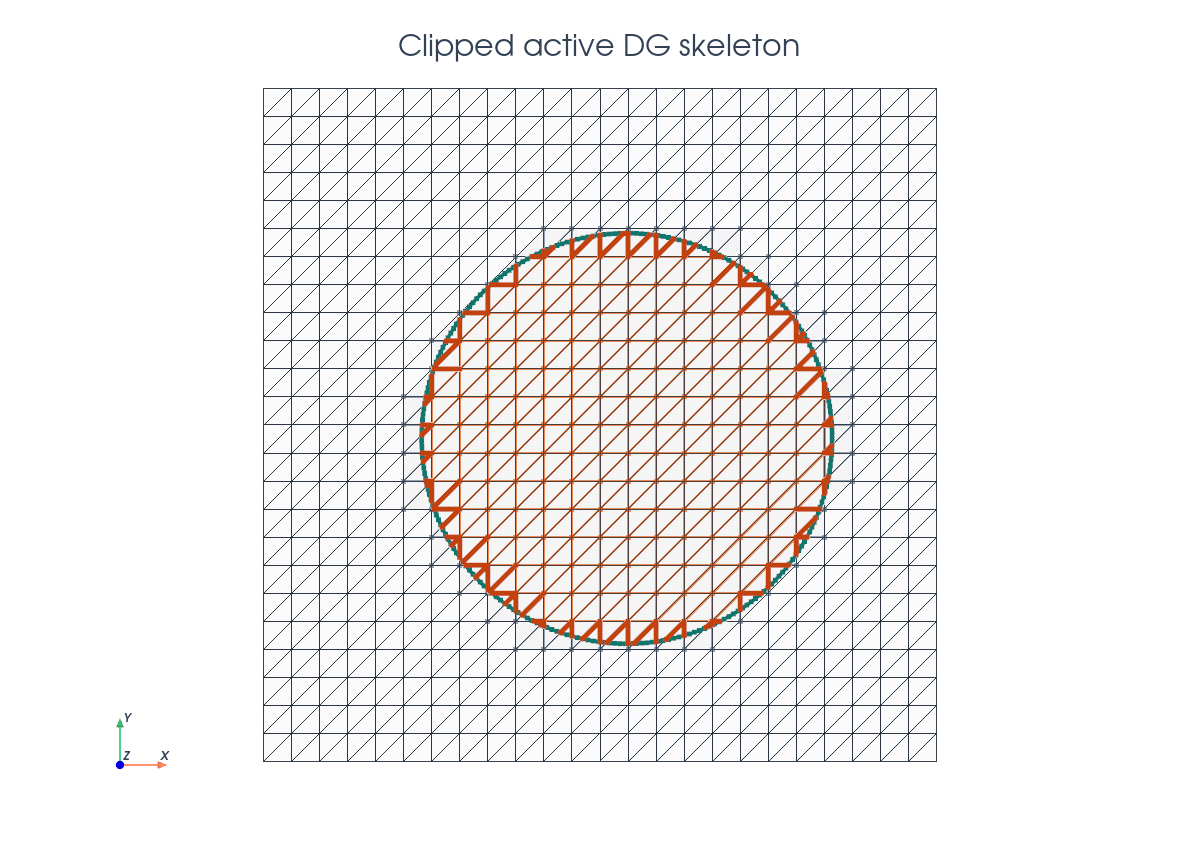
For the DG skeleton this measure has two pieces. omega_interior_facets
contains the full background interior facets that lie inside \(\Omega\).
omega_cut_facet_rules contains runtime quadrature on the clipped pieces
\(F\cap\Omega\) for facets cut by \(\Gamma\); its parent map corresponds to the
cut_skeleton_facets diagnostic set.
Active DG Skeleton#
The skeleton terms are only integrated on the part of each active interior facet that belongs to \(\Omega\). Facets fully inside \(\Omega\) contribute as ordinary background facets. Intersected facets only contribute on the clipped segment \(F\cap\Omega\), so the background support facet and the integration facet are not the same geometric object.
With \(h\) the cell diameter and \(\sigma\) the DG penalty, the symmetric interior penalty part has the form
n_facet = ufl.FacetNormal(msh)
h = ufl.CellDiameter(msh)
h_avg = ufl.avg(h)
sigma = penalty * degree**2
a = ufl.inner(ufl.grad(u), ufl.grad(v)) * dx_omega
jump_u = ufl.jump(u, n_facet)
jump_v = ufl.jump(v, n_facet)
a += -ufl.inner(ufl.avg(ufl.grad(u)), jump_v) * dS_omega
a += -ufl.inner(ufl.avg(ufl.grad(v)), jump_u) * dS_omega
a += sigma / h_avg * ufl.inner(jump_u, jump_v) * dS_omega
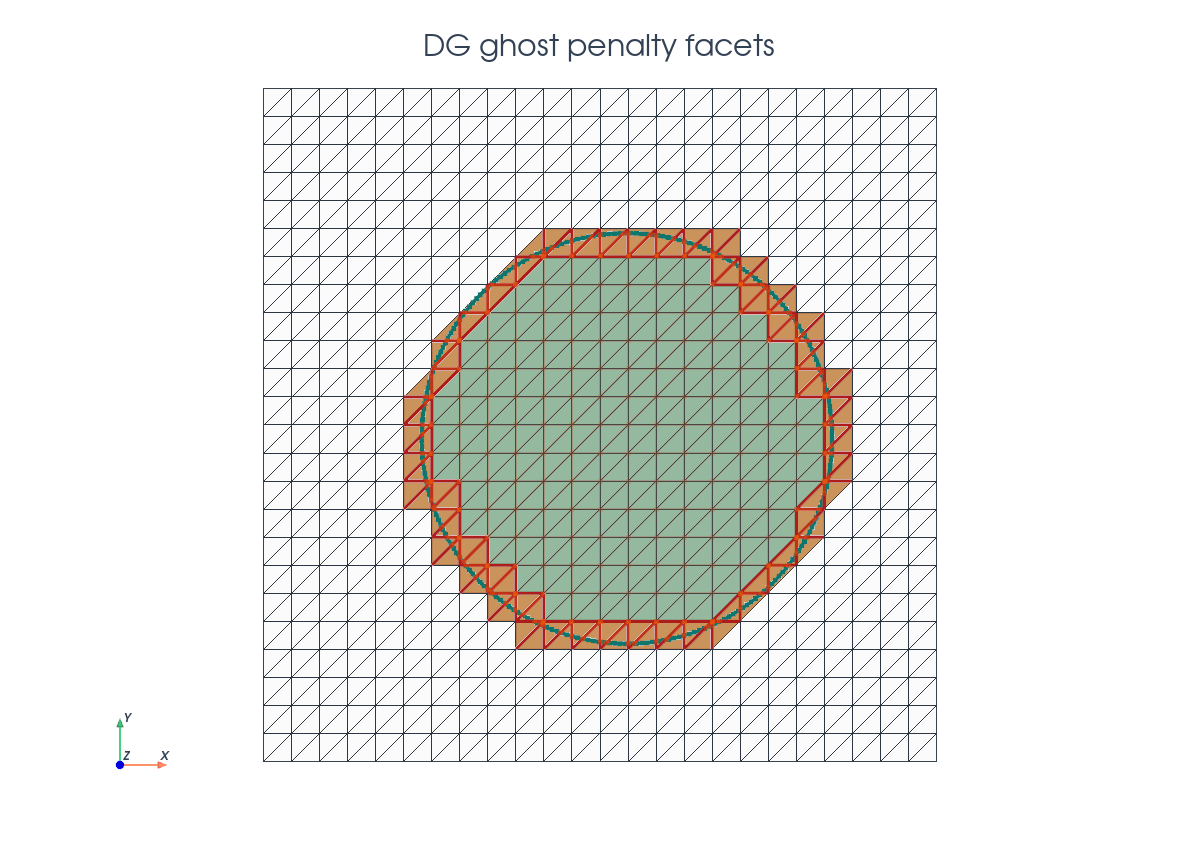
Boundary And Ghost Stabilization#
The Dirichlet condition on \(\Gamma\) is imposed with Nitsche terms. A ghost penalty then couples cut cells to neighboring interior cells, reducing the conditioning sensitivity caused by very small intersections.
n_gamma = cutfemx.normal(phi)
ghost_facets = cutfemx.ghost_penalty_facets(cell_cut, "phi<0")
dS_ghost = ufl.Measure("dS", domain=msh, subdomain_id=2, subdomain_data=ghost_facets)
The boundary terms use the same symmetric Nitsche structure as the continuous
Poisson example, but with the DG interface penalty sigma_gamma. The source
term and boundary data use the manufactured exact solution.
sigma_gamma = interface_penalty * degree**2
a += (
-ufl.dot(ufl.grad(u), n_gamma) * v
- ufl.dot(ufl.grad(v), n_gamma) * u
+ sigma_gamma / h * u * v
) * dx_gamma
L = f * v * dx_omega
L += (
-ufl.dot(ufl.grad(v), n_gamma) * u_exact
+ sigma_gamma / h * u_exact * v
) * dx_gamma
Ghost Penalty Implementation#
The ghost penalty is assembled on the background facets returned by
cutfemx.ghost_penalty_facets. These facets form a narrow band around the cut
cells and couple the DG gradients across neighboring active cells. This keeps
the system better conditioned when the physical domain cuts only a very small
part of a background cell.
In this demo the stabilization penalizes the normal jump of the gradient:
In UFL, ufl.jump(ufl.grad(u), n_facet) represents this normal gradient jump.
The term is only added when the ghost-facet set is non-empty.
if ghost_facets.size > 0:
a += (
ghost_penalty
* h_avg
* ufl.inner(
ufl.jump(ufl.grad(u), n_facet),
ufl.jump(ufl.grad(v), n_facet),
)
* dS_ghost
)
Solver And Error#
The final forms are wrapped as CutFEMx runtime forms. The assembly path builds a
serial sparse MatrixCSR, scatters the contributions, deactivates degrees of
freedom outside the active cut domain, and solves the resulting system with
SciPy.
a_form = cutfemx.fem.form(a)
L_form = cutfemx.fem.form(L)
A = cutfemx.fem.assemble_matrix(a_form)
A.scatter_reverse()
b = cutfemx.fem.assemble_vector(L_form)
b.scatter_reverse(la.InsertMode.add)
cutfemx.fem.deactivate_outside(A, b, cutfemx.fem.active_domain(a_form))
from scipy.sparse.linalg import spsolve
uh = fem.Function(V, name="u_h")
uh.x.array[:] = spsolve(A.to_scipy().tocsr(), b.array)
uh.x.scatter_forward()
After the solve, the demo interpolates the exact field into the DG space and
computes both a background error function and the cut-domain \(L^2\) error using
the same dx_omega measure as the variational form.
u_exact_bg = fem.Function(V, name="u_exact")
u_exact_bg.interpolate(lambda x: np.sin(np.pi * x[0]) * np.sin(np.pi * x[1]))
u_exact_bg.x.scatter_forward()
error_bg = fem.Function(V, name="u_error")
error_bg.x.array[:] = uh.x.array - u_exact_bg.x.array
error_bg.x.scatter_forward()
error_form = cutfemx.fem.form((uh - u_exact) ** 2 * dx_omega)
error_sq = cutfemx.fem.assemble_scalar(error_form)
error_sq = comm.allreduce(error_sq, op=MPI.SUM)
Solution Output#
The solution is visualized on the cut disk.
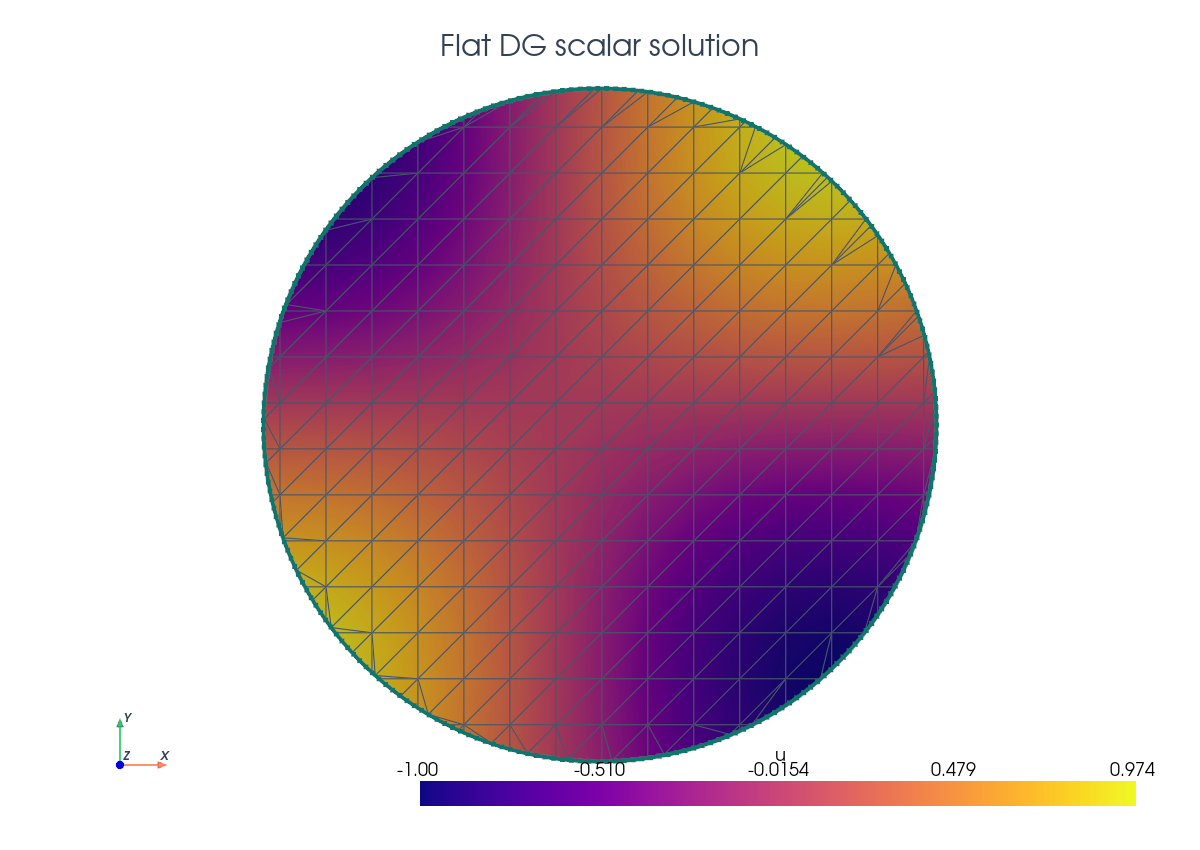
The output routine writes both the background fields and their restrictions to the physical cut domain. The cut mesh is an output mesh only.
cut_mesh = cutfemx.create_cut_mesh(cell_cut, "phi<0", mode="full")
phi_cut = cutfemx.fem.cut_function(phi_out, cut_mesh)
uh_cut = cutfemx.fem.cut_function(uh_out, cut_mesh)
cut_path = output_dir / "dg_poisson_cut_domain.xdmf"
with io.XDMFFile(comm, cut_path.as_posix(), "w") as xdmf:
xdmf.write_mesh(cut_mesh.mesh)
xdmf.write_function(phi_cut)
xdmf.write_function(uh_cut)
The script writes:
dg_poisson_xdmf/dg_poisson_background.xdmfdg_poisson_xdmf/dg_poisson_cut_domain.xdmf
Run The Demo#
python python/demo/demo_dg_poisson.py
Full Source#
The complete source remains available in the repository: python/demo/demo_dg_poisson.py.