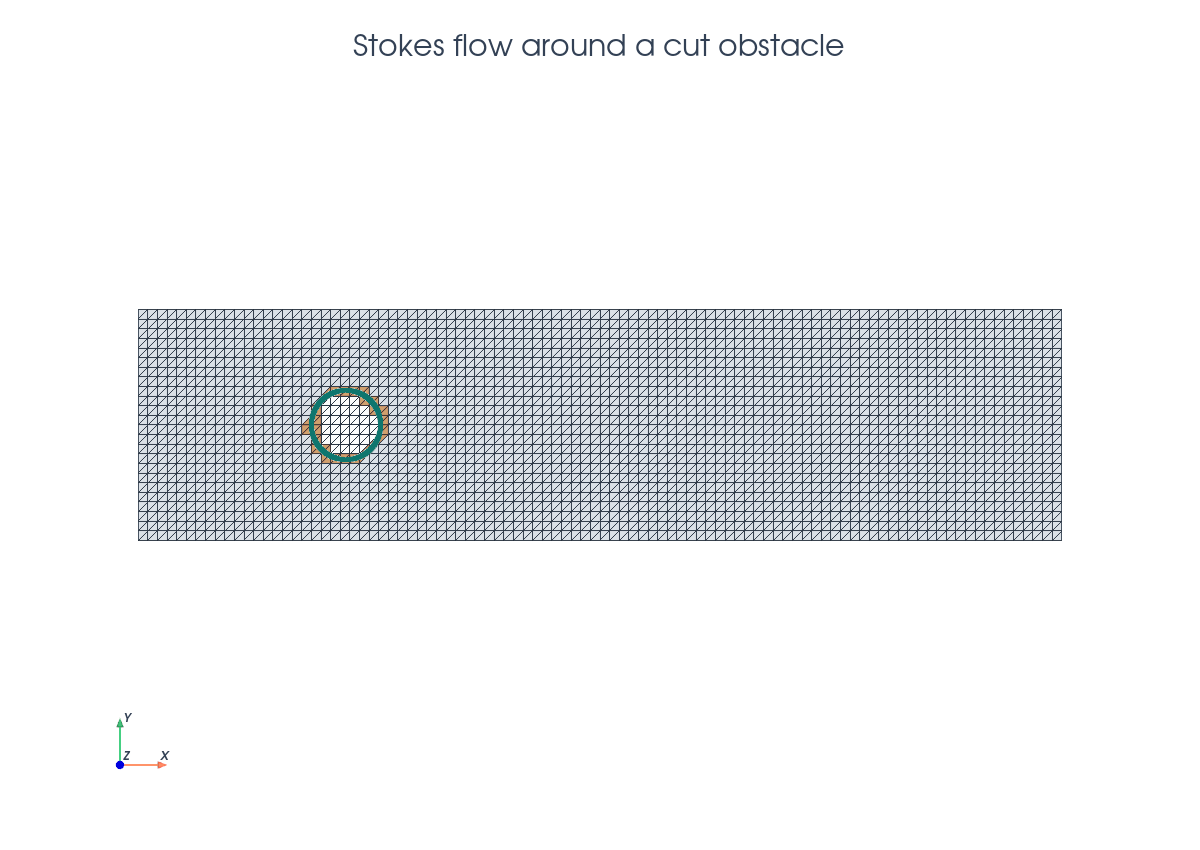
Stokes Flow#
This tutorial follows python/demo/demo_stokes.py. It solves a steady channel
Stokes problem with an unfitted circular obstacle. The inflow, walls, and
outflow are fitted boundary facets of the rectangular mesh, while the obstacle
boundary is represented by a level set and imposed weakly.
The Nitsche fictitious-domain Stokes terms and the velocity/pressure
stabilization are tied to the references listed in the related literature
below.
Model Problem#
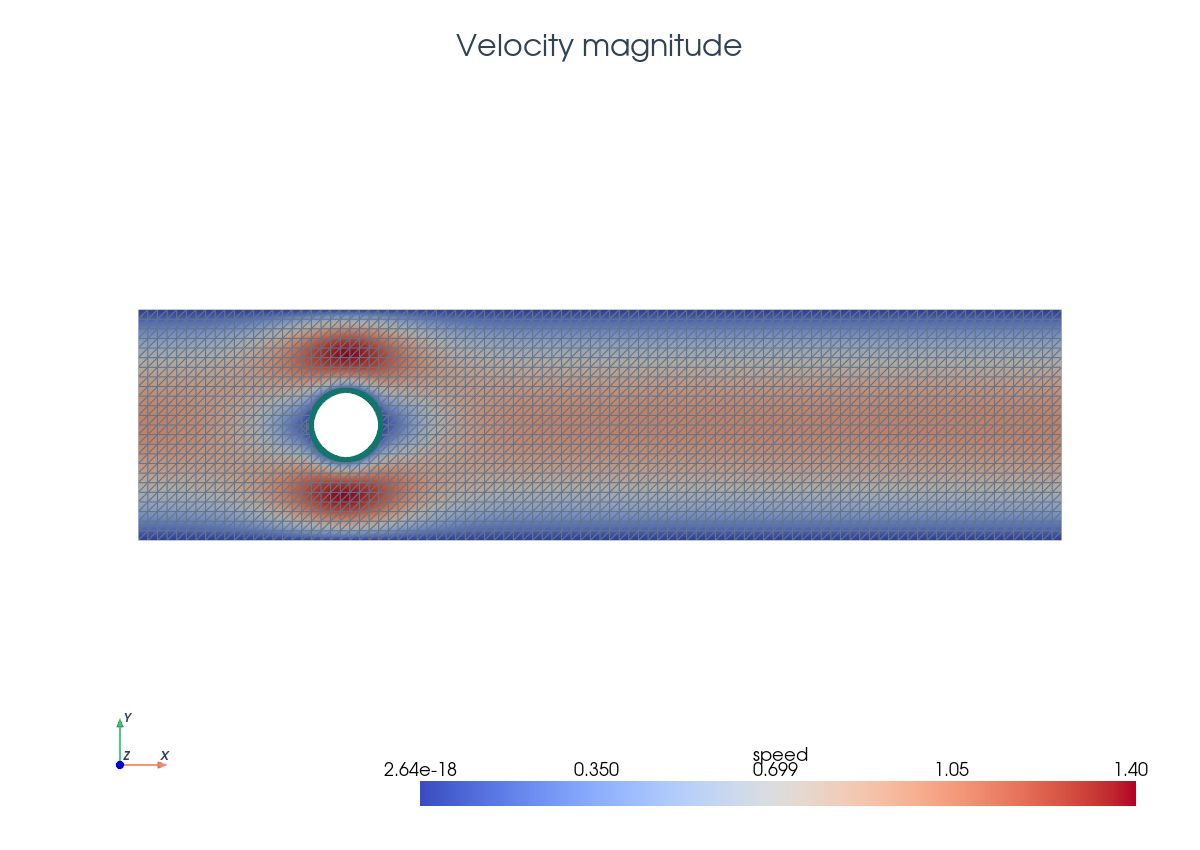
The fluid domain is
The demo solves the steady Stokes equations,
The fitted channel boundaries carry standard flow boundary conditions:
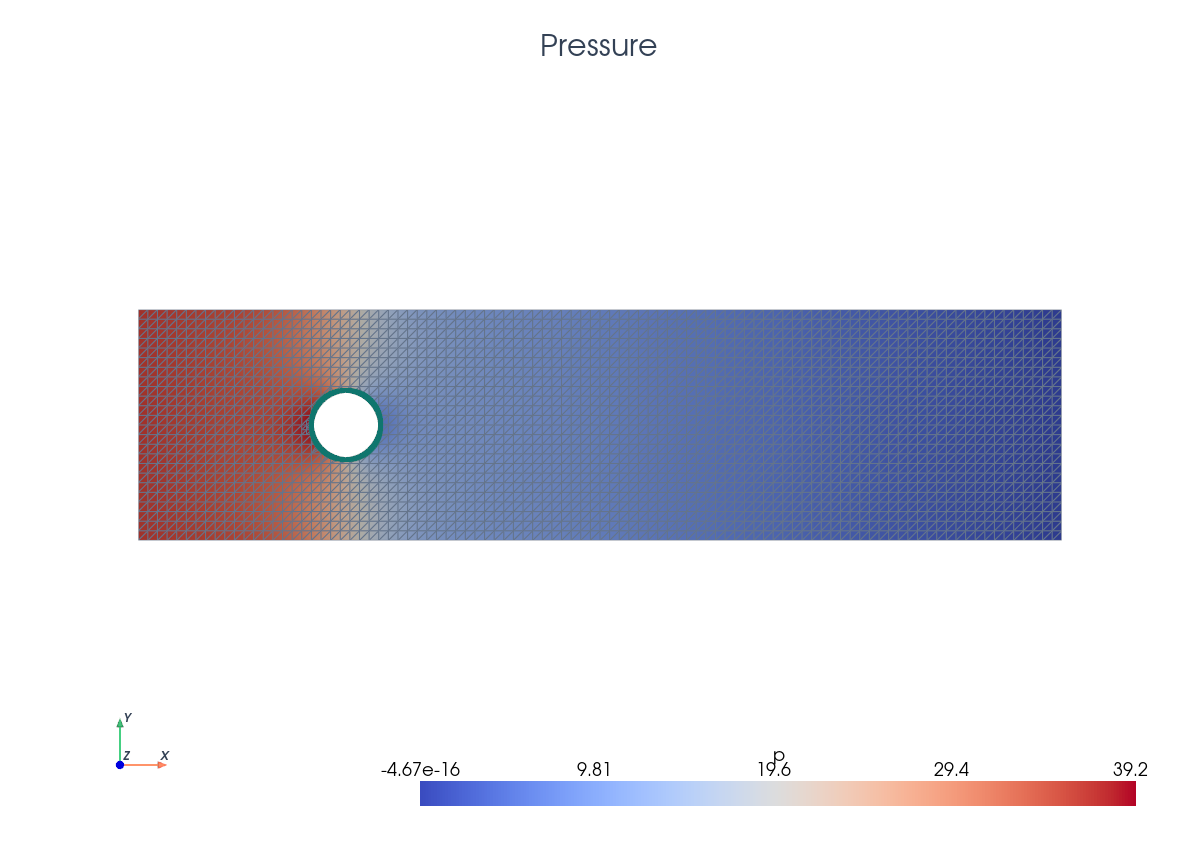
The circular obstacle has \(u=0\) on \(\Gamma=\{\phi=0\}\), imposed by Nitsche terms. The outflow pressure condition fixes the pressure reference on the fitted outlet. The velocity outflow condition remains natural in the weak form, so no strong velocity constraint is applied at \(x=5\).
Implementation Order#
The demo executes the solve in this order:
Define the positive-in-fluid cylinder level set, gradient-form traction, serial solve helper, and XDMF writer.
Build the triangular channel mesh and equal-order mixed P1/P1 space.
Interpolate the pressure-space level set and cut the fluid domain.
Locate fluid/cut cells, build fluid/interface rules, ghost facets, and the active pressure-stabilization skeleton.
Build
dx_omega,dx_gamma,dS_ghost, anddS_pressure.Assemble the Stokes volume terms, obstacle Nitsche terms, velocity ghost penalty, and pressure gradient-jump stabilization.
Build fitted inflow/wall velocity boundary conditions and the fitted outflow pressure condition, assemble with BCs, apply lifting, deactivate inactive dofs, and solve.
Split velocity/pressure, interpolate velocity for XDMF compatibility, print diagnostics, and write background plus cut-fluid XDMF files.
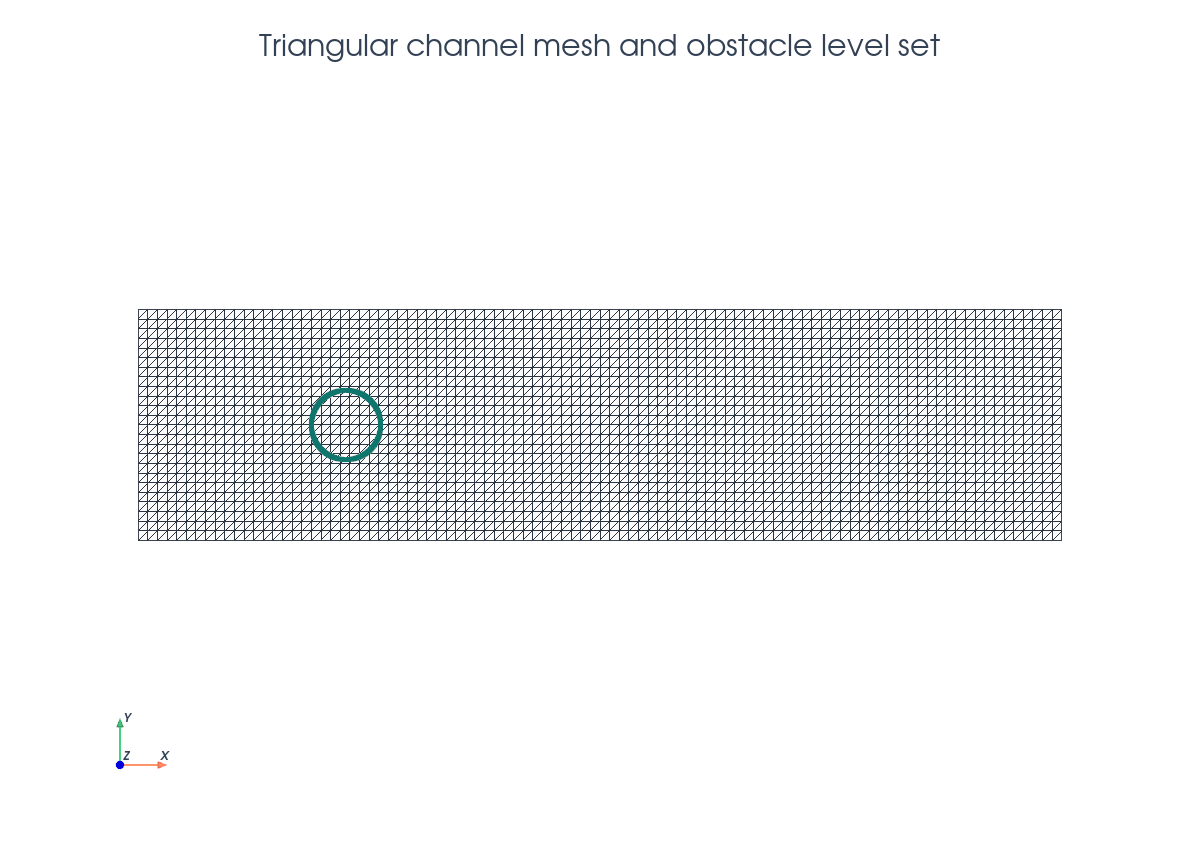
Triangular Channel Mesh#
The mesh is created exactly as in the demo: a rectangle with 4*n cells in
the streamwise direction and n cells across the channel, using triangular
cells.
msh = mesh.create_rectangle(
comm,
((-3.0, -1.0), (5.0, 1.0)),
(4 * n, n),
cell_type=mesh.CellType.triangle,
)
The velocity and pressure are both continuous P1 fields. The equal-order pair is stabilized by a pressure gradient-jump term on the active skeleton.
P1 = basix.ufl.element("Lagrange", msh.basix_cell(), 1)
P1_vec = basix.ufl.element(
"Lagrange", msh.basix_cell(), 1, shape=(msh.geometry.dim,)
)
W = fem.functionspace(msh, basix.ufl.mixed_element([P1_vec, P1]))
Cut Fluid Domain#
The positive phase is the fluid. Cut cells are handled separately because they need partial-volume and interface quadrature.
cylinder_center = (-1.2, 0.0)
cylinder_radius = 0.3
level_set = fem.Function(Q, name="phi")
level_set.interpolate(cylinder_level_set(cylinder_center, cylinder_radius))
level_set.x.scatter_forward()
cut_data = cutfemx.cut(level_set)
fluid_cells = cutfemx.locate_entities(cut_data, "phi>0")
cut_cells = cutfemx.locate_entities(cut_data, "phi=0")
The strict selector "phi>0" gives the ordinary fluid cells used with standard
cell quadrature. The cut cells are not added as full cells in dx_omega; their
fluid portions are integrated by the runtime quadrature rules below.
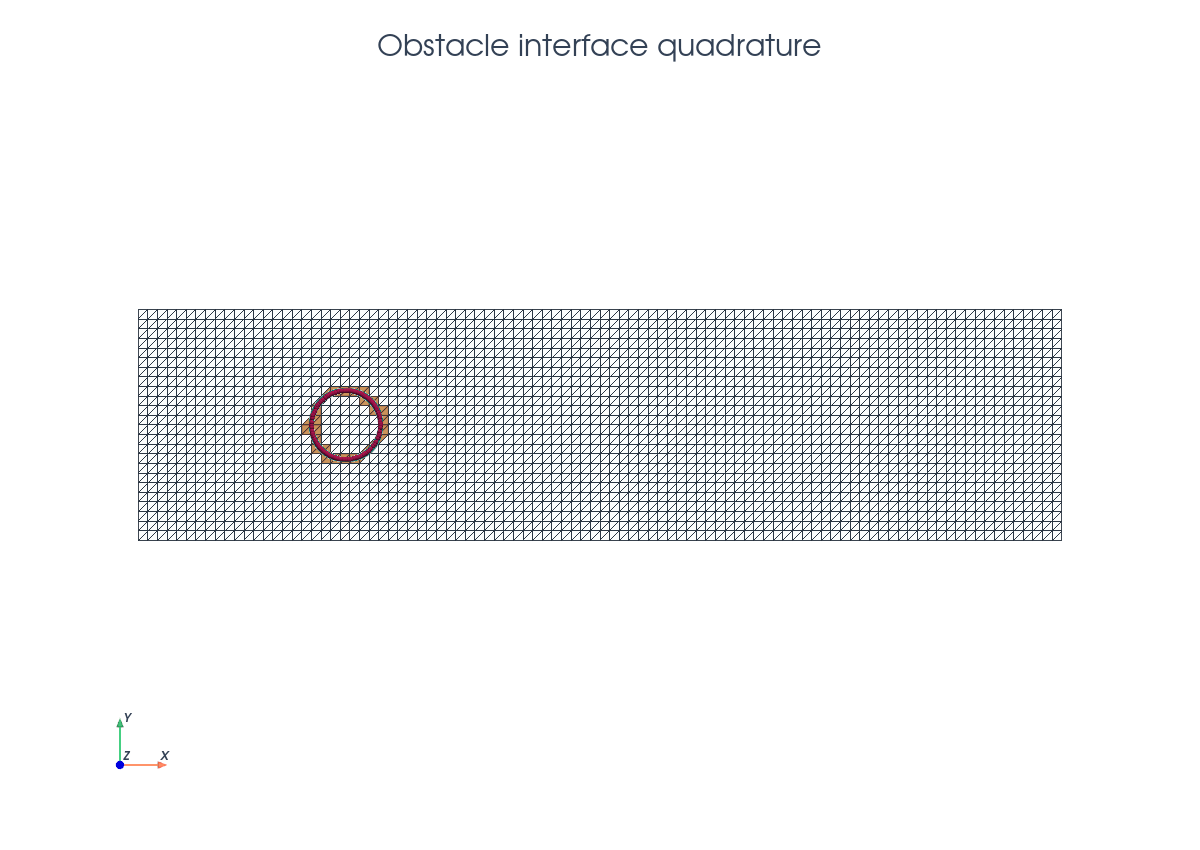
Interface Quadrature And Nitsche Terms#
The obstacle boundary is not part of the mesh topology. CutFEMx supplies physical quadrature points on the embedded circle, and the normal is computed from the level set.
fluid_rules = cutfemx.runtime_quadrature(cut_data, "phi>0", order)
interface_rules = cutfemx.runtime_quadrature(cut_data, "phi=0", order)
dx_omega = ufl.Measure(
"dx", domain=msh, subdomain_id=0, subdomain_data=[fluid_cells, fluid_rules]
)
dx_gamma = ufl.Measure("dx", domain=msh, subdomain_id=1, subdomain_data=interface_rules)
n_gamma = -cutfemx.normal(level_set)
Weak Formulation#
Let \(V_h\) be the continuous P1 velocity space and \(Q_h\) the continuous P1 pressure space on the background mesh. Strong Dirichlet data are applied on the fitted inflow, wall, and outflow-pressure facets, so the corresponding test functions vanish there. No strong velocity condition is applied at the outflow.
The cut-domain volume contribution is the standard mixed Stokes form:
In code this is the first block of the bilinear form:
a = nu * ufl.inner(ufl.grad(u), ufl.grad(v)) * dx_omega
a += -p * ufl.div(v) * dx_omega
a += ufl.div(u) * q * dx_omega
The weak obstacle terms use the Stokes traction \(t(u,p)=(\nu\nabla u-pI)n_\Gamma\) and impose \(u=0\) on \(\Gamma=\{\phi=0\}\) by symmetric Nitsche terms:
def traction(u, p, nu, n):
return nu * ufl.dot(ufl.grad(u), n) - p * n
a += -ufl.inner(traction(u, p, nu, n_gamma), v) * dx_gamma
a += -ufl.inner(traction(v, q, nu, n_gamma), u) * dx_gamma
a += gamma_u * nu / h * ufl.inner(u, v) * dx_gamma
The right-hand side is zero in this example,
because the flow is driven by the strong parabolic inflow condition.
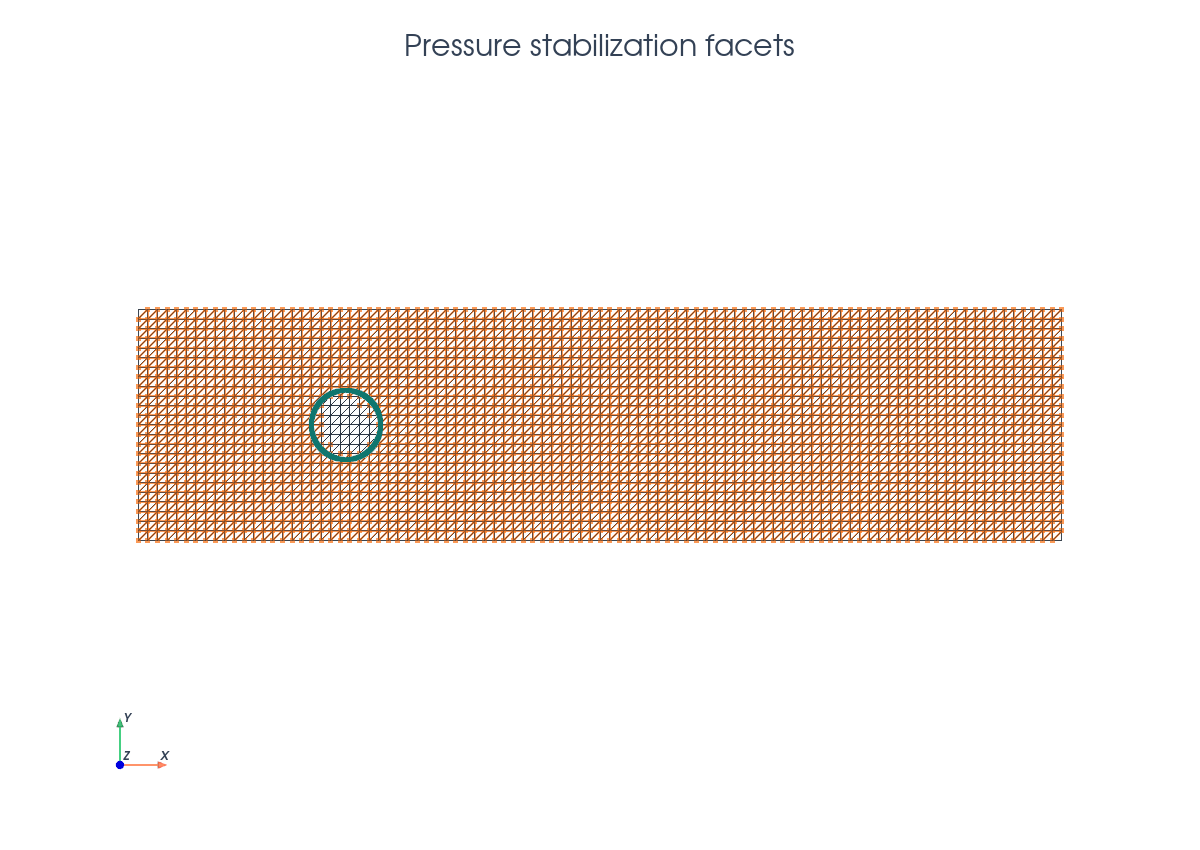
Stabilization Facets#
The demo uses different facet sets for pressure and velocity stabilization. This separation matters: equal-order pressure stability is a global active skeleton requirement, while velocity stabilization is only needed to control small cut-cell extensions near the unfitted obstacle.
ghost_facets = cutfemx.ghost_penalty_facets(cut_data, "phi>0")
active_cells = np.union1d(fluid_cells, cut_cells)
pressure_facets = cutfemx.interior_facets_for_cells(msh, active_cells)
dS_ghost = ufl.Measure("dS", domain=msh, subdomain_id=2, subdomain_data=ghost_facets)
dS_pressure = ufl.Measure("dS", domain=msh, subdomain_id=3, subdomain_data=pressure_facets)
Pressure Stabilization#
The P1/P1 pair does not satisfy the inf-sup condition without additional stabilization. The demo therefore adds a pressure gradient-jump term on all active interior facets,
The term is
In the implementation this is the dS_pressure contribution
a += (
gamma_p
* ufl.avg(h) ** 3
* ufl.inner(
ufl.jump(ufl.grad(p), n_facet),
ufl.jump(ufl.grad(q), n_facet),
)
* dS_pressure
)
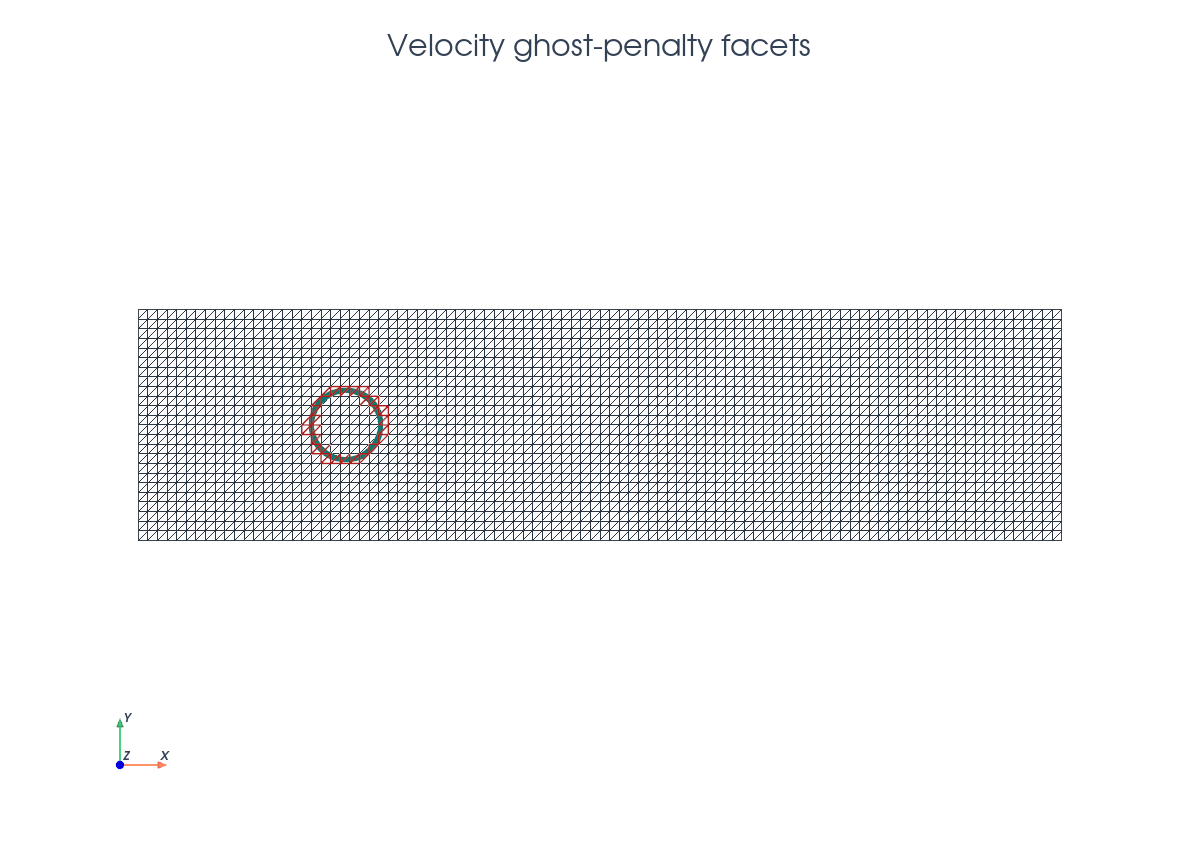
Velocity Ghost Penalty#
Velocity does not receive a gradient-jump term on the full active skeleton.
Instead, it is stabilized only on the ghost-penalty band
\(\mathcal F_g\) returned by ghost_penalty_facets(cut_data, "phi>0"). This
band couples cut cells to neighboring fluid cells and controls conditioning
when the circle leaves very small intersections.
The code deliberately uses dS_ghost, not dS_pressure, for this term:
if ghost_facets.size > 0:
a += (
gamma_g
* ufl.avg(h)
* ufl.inner(
ufl.jump(ufl.grad(u), n_facet),
ufl.jump(ufl.grad(v), n_facet),
)
* dS_ghost
)
The full bilinear form is therefore
Boundary Conditions And Output#
The strong boundary conditions are velocity conditions on the fitted inflow and channel walls, plus a pressure condition on the fitted outflow. The pressure condition fixes the pressure level and sets the outlet reference value to zero. After solving, CutFEMx writes both background and cut-fluid XDMF files.
inflow_u = fem.Function(V)
inflow_u.interpolate(lambda x: np.stack((1.0 - x[1] ** 2, np.zeros_like(x[0]))))
walls_u = fem.Function(V)
walls_u.x.array[:] = 0.0
outflow_p = fem.Function(Q)
outflow_p.x.array[:] = 0.0
inflow_facets = mesh.locate_entities_boundary(
msh, facet_dim, lambda x: np.isclose(x[0], -3.0)
)
wall_facets = mesh.locate_entities_boundary(
msh, facet_dim, lambda x: np.isclose(np.abs(x[1]), 1.0)
)
outflow_facets = mesh.locate_entities_boundary(
msh, facet_dim, lambda x: np.isclose(x[0], 5.0)
)
inflow_dofs = fem.locate_dofs_topological((W.sub(0), V), facet_dim, inflow_facets)
wall_dofs = fem.locate_dofs_topological((W.sub(0), V), facet_dim, wall_facets)
outflow_pressure_dofs = fem.locate_dofs_topological(
(W.sub(1), Q), facet_dim, outflow_facets
)
bcs = [
fem.dirichletbc(inflow_u, inflow_dofs, W.sub(0)),
fem.dirichletbc(walls_u, wall_dofs, W.sub(0)),
fem.dirichletbc(outflow_p, outflow_pressure_dofs, W.sub(1)),
]
Deactivation#
The Stokes unknown is a mixed background field, so the linear system contains velocity and pressure degrees of freedom on the whole rectangular mesh. The forms only integrate over the fluid phase \(\Omega=\{\phi>0\}\), which means degrees of freedom supported entirely inside the solid obstacle would otherwise produce empty matrix rows. These rows are not physical unknowns of the cut problem and must be deactivated before the sparse solve.
The active domain is computed from the assembled CutFEMx form. It includes the mixed dofs touched by the volume, interface, ghost-penalty, pressure stabilization, and fitted-boundary terms. After assembly, CutFEMx replaces inactive rows by identity rows and sets the corresponding right-hand-side entries consistently. This gives the serial sparse system a well-defined value for every background dof while leaving the active fluid equations unchanged.
The order is important when strong fitted boundary conditions are present: assemble with the velocity and pressure BCs, apply the usual lifting and boundary values, scatter the vector contributions, and only then deactivate inactive cut-domain dofs.
a_form = cutfemx.fem.form(a)
L_form = cutfemx.fem.form(L)
A = cutfemx.fem.assemble_matrix(a_form, bcs=bcs)
A.scatter_reverse()
b = cutfemx.fem.assemble_vector(L_form)
cutfemx.fem.apply_lifting(b.array, [a_form], [bcs])
b.scatter_reverse(la.InsertMode.add)
fem.set_bc(b.array, bcs)
active = cutfemx.fem.active_domain(a_form)
cutfemx.fem.deactivate_outside(A, b, active)
The fitted inflow, wall, and outflow-pressure dofs are still handled as ordinary DOLFINx Dirichlet conditions. Deactivation handles a different set of rows: mixed velocity-pressure dofs that are outside the active fluid problem because the obstacle cut removed their support.
The script writes velocity and pressure fields in stokes_xdmf/.
Run The Demo#
python python/demo/demo_stokes.py
Full Source#
The complete source remains available in the repository: python/demo/demo_stokes.py.