Elasticity#
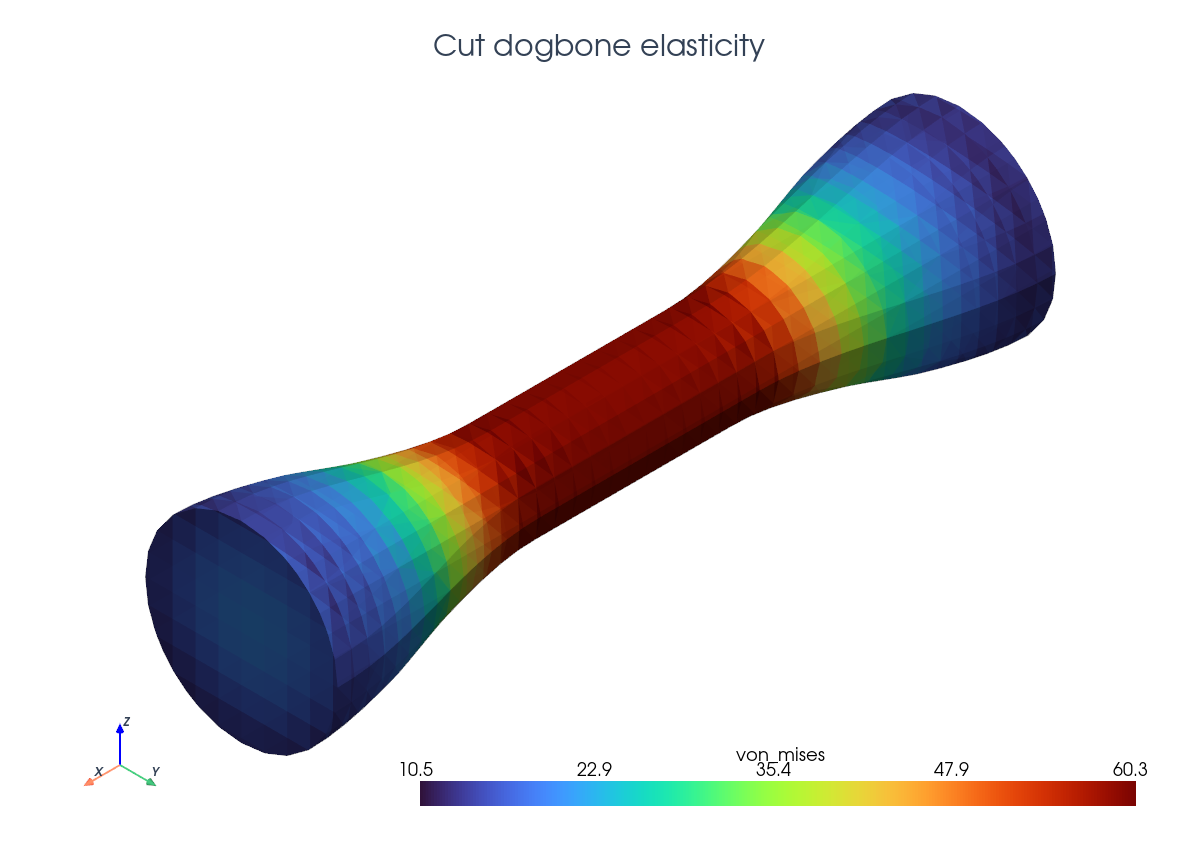
This tutorial follows python/demo/demo_elasticity.py. The physical domain is
a dogbone specimen cut from a tetrahedral background mesh. The left end is
clamped, the right end is pulled in the \(x\) direction, and the solid domain is
selected by the negative phase of a level set.
The cut elasticity formulation is related to the linear-elasticity CutFEM
analysis cited in the related literature below.
Model#
The demo uses small-strain isotropic linear elasticity:
The weak form is
with zero body force in this demo.
Dogbone Level Set#
The solid is defined by the negative phase of a P1 level-set function. For a point \(x=(x_0,x_1,x_2)\), the demo first computes a normalized axial coordinate
then applies a cubic smoothstep to make the shoulder transition smooth:
The level set is
so \(\phi<0\) selects the dogbone solid, \(\phi=0\) is the cut surface, and \(\phi>0\) is outside the specimen.
def dogbone_level_set(
half_length: float,
grip_radius: float,
waist_radius: float,
gauge_half_length: float,
):
def phi(x: np.ndarray) -> np.ndarray:
t = (np.abs(x[0]) - gauge_half_length) / (half_length - gauge_half_length)
t = np.clip(t, 0.0, 1.0)
shoulder = t * t * (3.0 - 2.0 * t)
radius = waist_radius + (grip_radius - waist_radius) * shoulder
return np.sqrt(x[1] ** 2 + x[2] ** 2) - radius
return phi
Implementation Order#
The demo runs in this order:
Define the dogbone level set.
Build the tetrahedral background mesh and interpolate the P1 level set.
Cut the solid, locate
solid_cells, buildsolid_rules, and selectghost_facets.Build
dx_solid,dS_ghost, the vector Lagrange space, material constants, elasticity bilinear form, and zero body-force linear form.Locate left/right fitted end facets and create the strong displacement boundary conditions.
Assemble with boundary conditions, apply lifting, deactivate inactive dofs, and solve the serial sparse system.
Interpolate a DG0 von Mises field, print diagnostics, and write both background and cut-solid XDMF outputs.
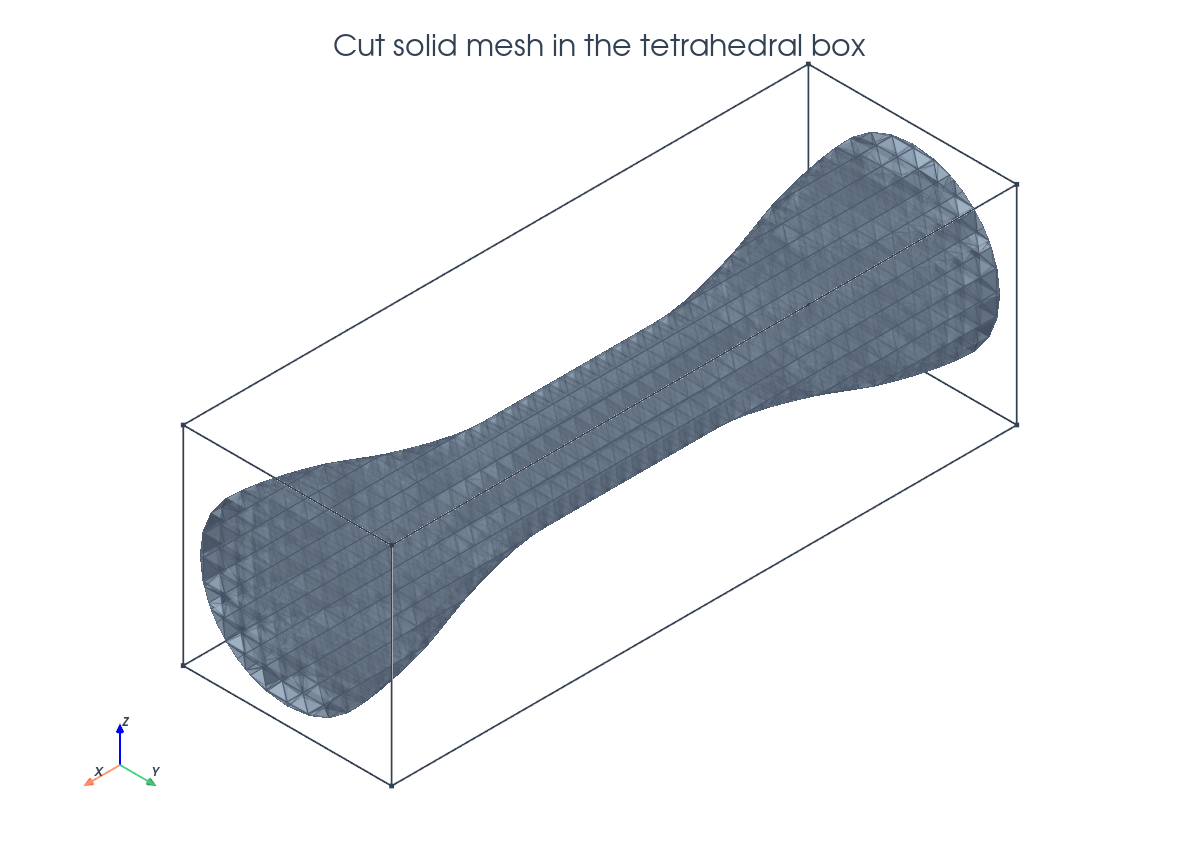
Tetrahedral Background And Cut Solid#
The background mesh is a box of tetrahedra. The dogbone is represented by a smooth radius profile in the level-set function, not by a fitted surface mesh.
msh = mesh.create_box(
comm,
(
np.array([-half_length, -box_radius, -box_radius]),
np.array([half_length, box_radius, box_radius]),
),
(4 * n, n, n),
cell_type=mesh.CellType.tetrahedron,
)
phi = fem.Function(V_phi, name="phi")
phi.interpolate(dogbone_level_set(half_length, grip_radius, waist_radius, gauge_half_length))
phi.x.scatter_forward()
cut_data = cutfemx.cut(phi)
solid_cells = cutfemx.locate_entities(cut_data, "phi<0")
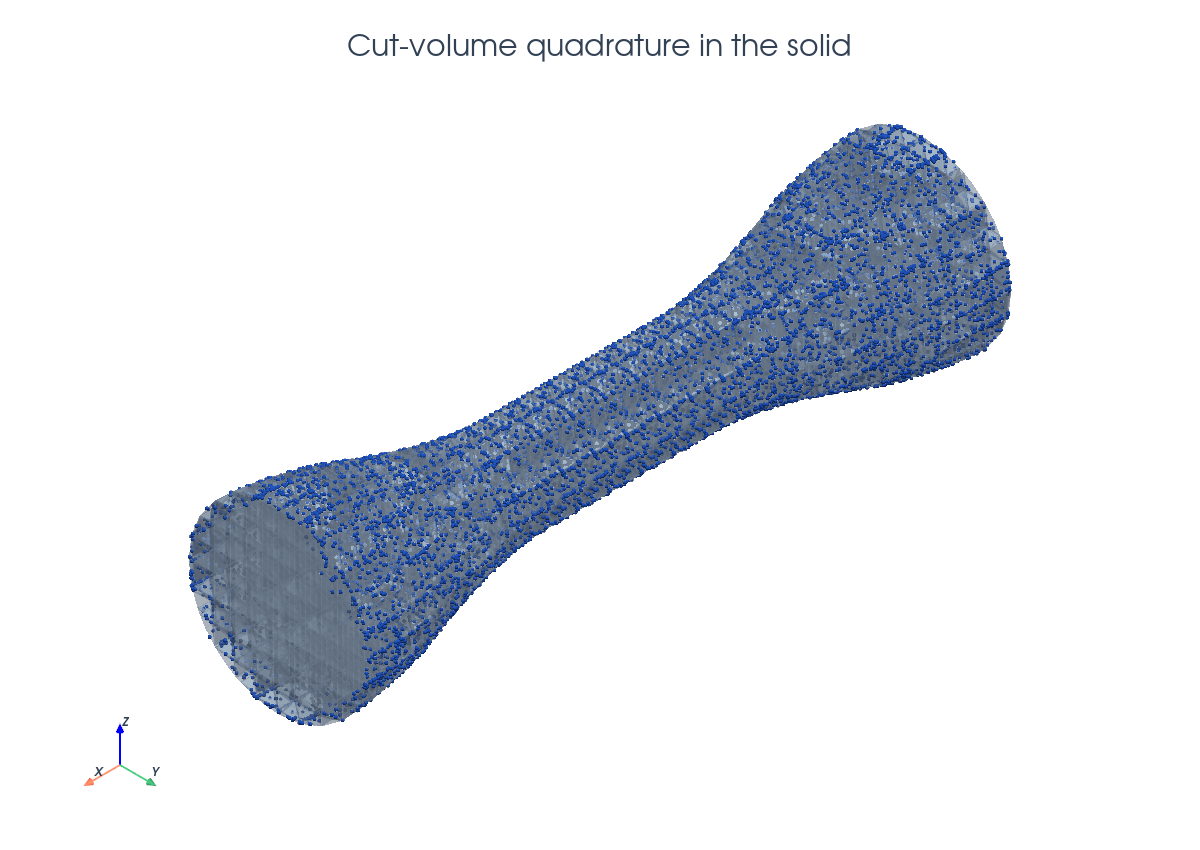
Cut-Volume Quadrature#
The volume integral is evaluated on the part of each cut tetrahedron belonging to the solid. Interior solid cells and cut-cell runtime rules are combined in one measure.
solid_rules = cutfemx.runtime_quadrature(cut_data, "phi<0", order)
dx_solid = ufl.Measure(
"dx", domain=msh, subdomain_id=0, subdomain_data=[solid_cells, solid_rules]
)
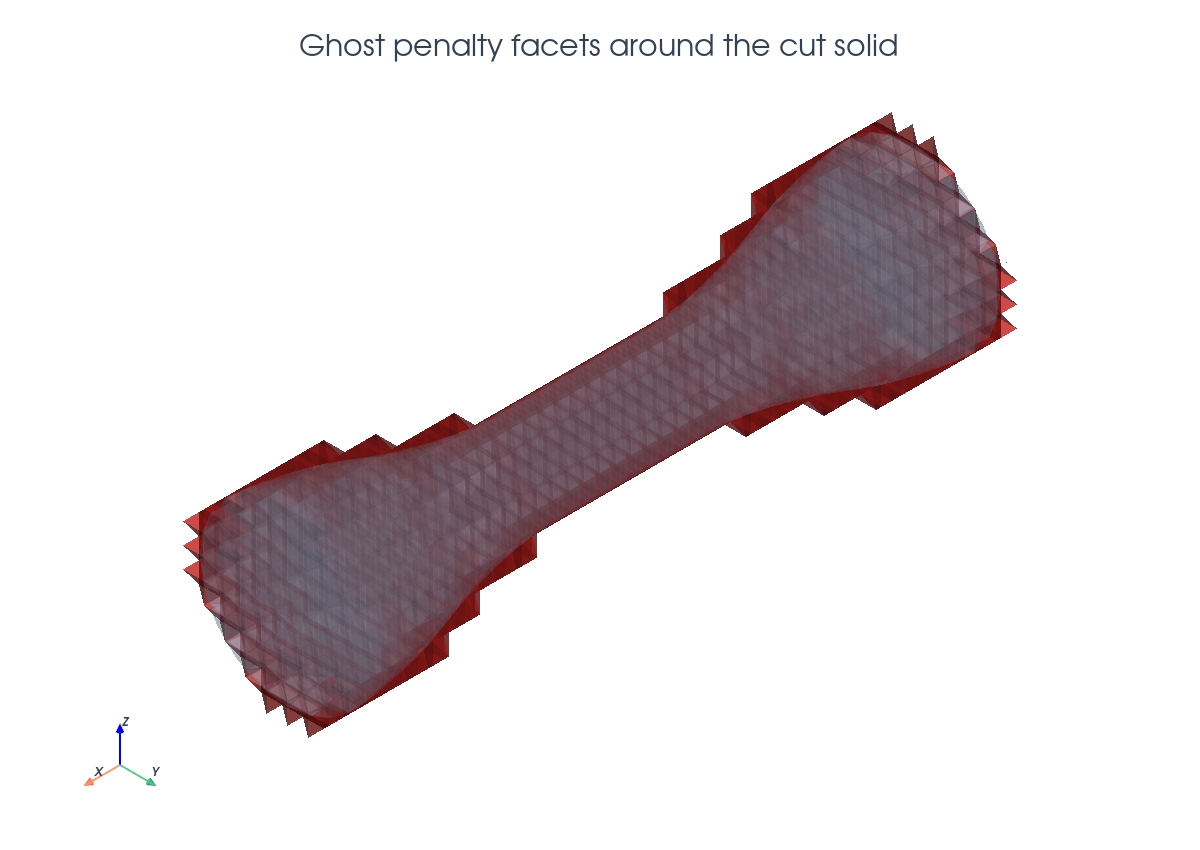
Ghost Stabilization#
The ghost penalty stabilizes displacement gradients across facets near the cut surface.
ghost_facets = cutfemx.ghost_penalty_facets(cut_data, "phi<0")
dS_ghost = ufl.Measure("dS", domain=msh, subdomain_id=1, subdomain_data=ghost_facets)
a = ufl.inner(sigma(u, mu, lmbda, gdim), epsilon(v)) * dx_solid
if ghost_facets.size > 0:
n_facet = ufl.FacetNormal(msh)
h_avg = ufl.avg(ufl.CellDiameter(msh))
a += gamma_ghost * (2.0 * mu + lmbda) * h_avg * ufl.inner(
ufl.jump(ufl.grad(u), n_facet),
ufl.jump(ufl.grad(v), n_facet),
) * dS_ghost
Boundary Conditions#
The mechanical boundary conditions are fitted on the box ends: all components are fixed on the left, and the \(x\) component is prescribed on the right.
left_facets = mesh.locate_entities_boundary(
msh, facet_dim, lambda x: np.isclose(x[0], -half_length)
)
right_facets = mesh.locate_entities_boundary(
msh, facet_dim, lambda x: np.isclose(x[0], half_length)
)
u_left = fem.Function(V)
left_dofs = fem.locate_dofs_topological(V, facet_dim, left_facets)
bcs = [fem.dirichletbc(u_left, left_dofs)]
Vx, _ = V.sub(0).collapse()
u_right_x = fem.Function(Vx)
u_right_x.interpolate(lambda x: pull * np.ones_like(x[0]))
right_x_dofs = fem.locate_dofs_topological((V.sub(0), Vx), facet_dim, right_facets)
bcs.append(fem.dirichletbc(u_right_x, right_x_dofs, V.sub(0)))
Assembly And Solve#
The solver helper follows the actual CutFEMx MatrixCSR path. Boundary conditions are applied during matrix assembly, the right-hand side is lifted, inactive dofs are deactivated from the form active domain, and SciPy solves the serial sparse matrix.
a_form = cutfemx.fem.form(a)
L_form = cutfemx.fem.form(L)
A = cutfemx.fem.assemble_matrix(a_form, bcs=bcs)
A.scatter_reverse()
b = cutfemx.fem.assemble_vector(L_form)
cutfemx.fem.apply_lifting(b.array, [a_form], [bcs])
b.scatter_reverse(la.InsertMode.add)
fem.set_bc(b.array, bcs)
active = cutfemx.fem.active_domain(a_form)
cutfemx.fem.deactivate_outside(A, b, active)
uh = fem.Function(V, name="deformation")
uh.x.array[:] = spsolve(A.to_scipy().tocsr(), b.array)
uh.x.scatter_forward()
Stress Output#
After solving, the demo derives a scalar von Mises stress field from the computed displacement. The stress tensor is first defined in UFL from the small-strain tensor,
def epsilon(u):
return ufl.sym(ufl.grad(u))
def sigma(u, mu: float, lmbda: float, gdim: int):
eps = epsilon(u)
return 2.0 * mu * eps + lmbda * ufl.tr(eps) * ufl.Identity(gdim)
For this 3D example, the von Mises stress is the scalar UFL expression
The demo writes this definition directly in UFL:
def von_mises_3d(u, mu: float, lmbda: float):
stress = sigma(u, mu, lmbda, 3)
return ufl.sqrt(
0.5
* (
(stress[0, 0] - stress[1, 1]) ** 2
+ (stress[1, 1] - stress[2, 2]) ** 2
+ (stress[2, 2] - stress[0, 0]) ** 2
)
+ 3.0 * (stress[0, 1] ** 2 + stress[1, 2] ** 2 + stress[2, 0] ** 2)
)
The output field is cellwise constant. The helper
compute_von_mises_on_background_mesh creates a DG0 scalar space on the
background mesh, converts the UFL expression to a dolfinx.fem.Expression at
the DG0 interpolation points, and interpolates one value per background cell:
def compute_von_mises_on_background_mesh(
u: fem.Function,
mu: float,
lmbda: float,
) -> fem.Function:
msh = u.function_space.mesh
Q = fem.functionspace(msh, ("Discontinuous Lagrange", 0))
stress = fem.Function(Q, name="von_mises")
interpolation_points = Q.element.interpolation_points
if callable(interpolation_points):
interpolation_points = interpolation_points()
stress.interpolate(
fem.Expression(von_mises_3d(u, mu, lmbda), interpolation_points)
)
return stress
This is an interpolation of the stress expression, not an additional variational projection. Since the displacement is P1, its gradient and the linear-elastic stress are cellwise constant on each background tetrahedron, so DG0 is the natural output space for this diagnostic.
The background DG0 field is then restricted to the physical cut-solid mesh with
cutfemx.fem.cut_function before writing the cut-domain XDMF file:
von_mises = compute_von_mises_on_background_mesh(uh, mu, lmbda)
cut_mesh = cutfemx.create_cut_mesh(cut_data, "phi<0", mode="full")
stress_cut = cutfemx.fem.cut_function(von_mises, cut_mesh)
stress_cut.name = "von_mises"
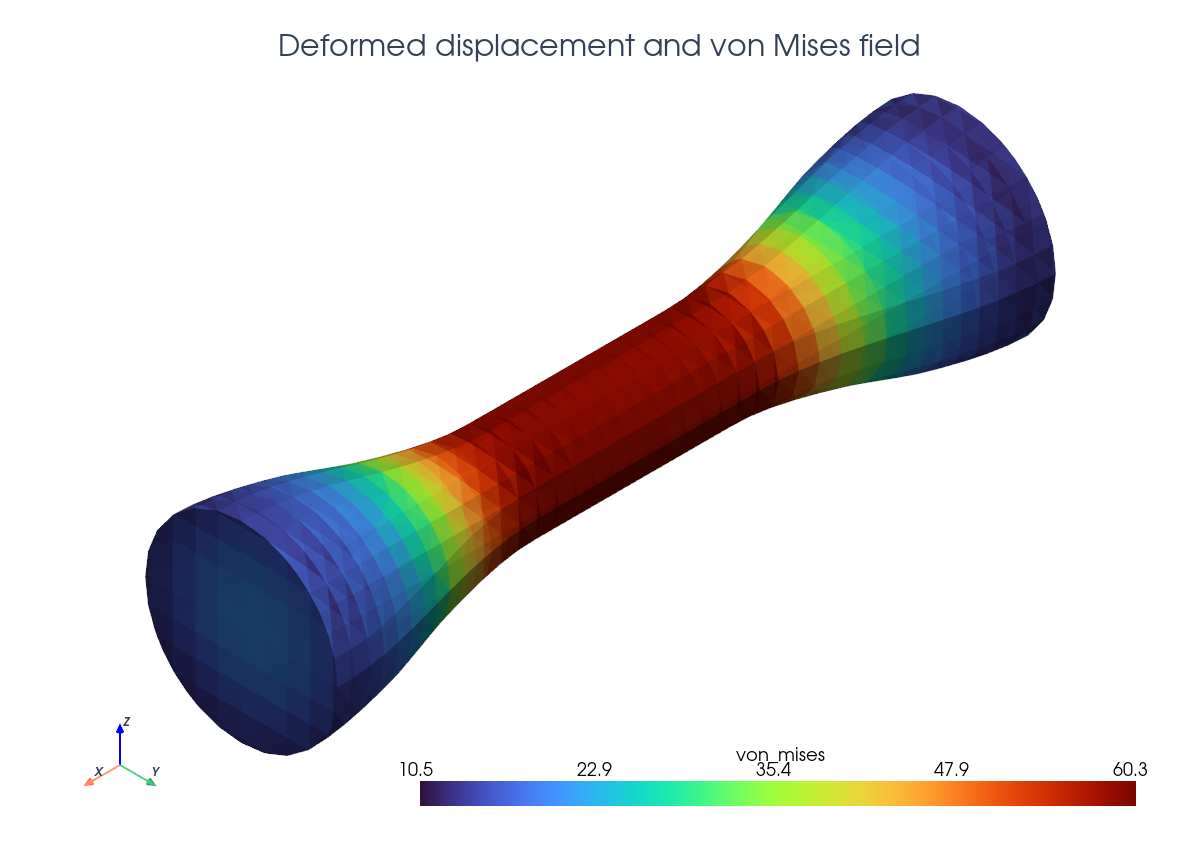
The tutorial view below shows the deformed cut mesh colored by that computed DG0 von Mises field.
The script writes background and cut-solid deformation and von Mises stress
fields in elasticity_xdmf/.
Run The Demo#
python python/demo/demo_elasticity.py
Full Source#
The complete source remains available in the repository: python/demo/demo_elasticity.py.